The main features of the new arduplane 2.33 release are:
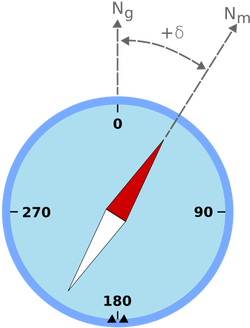
- the new automatic compass declination code written by Adam Rivera
- new MAVLink stream handling
- improved telemetry rate negotiation with the new 3DR radios







 RSS Feed
RSS Feed
