
There are a lot of changes in this release, the main focus was on performance improvements!
Some of the highlights are:
Some of the highlights are:
- new APM_Control attitude controllers.
- new TECS speed/height controller from Paul Riseborough.
- two new flight modes, ACRO and CRUISE
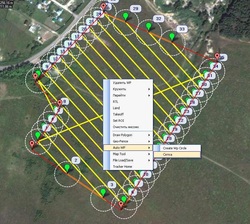
- new camera trigger by distance system, for better aerial mapping
- dozens of small fixes and improvements from two months of development
- lots more documentation, including tuning guides for all the new parameters





 RSS Feed
RSS Feed
